| |  
Latest project list from 2016 - Image-based Variation Tracking and 4D Motion Modeling
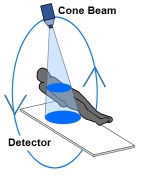 Precise estimation of respiratory motion in Cone Beam Computed Tomography (CBCT) is crucial for image-guided stereotactic body radiation therapy, gated therapy, and tumor tracking in thorax and upper abdomen regions. For breathing motion tracking, many existing techniques use markers, which require additional tasks to acquire effective estimation results. For CBCT image reconstruction, few studies have been conducted on three-dimensional (3D) reconstruction. In addition, previous four-dimensional (4D) lung models are based on fan beam computed tomography, which are all-in-one models disregarding patients’ different shape of the organs and breathing patterns. To overcome these limitations, our goals are to track breathing motion without the surrogate, to build a 3D model based on CBCT images, and to achieve patient-customized 4D respiratory motion modeling. It is expected that this study would shorten respiration tracking processes and would enhance the accuracy of diagnosis, planning, and does delivery. Precise estimation of respiratory motion in Cone Beam Computed Tomography (CBCT) is crucial for image-guided stereotactic body radiation therapy, gated therapy, and tumor tracking in thorax and upper abdomen regions. For breathing motion tracking, many existing techniques use markers, which require additional tasks to acquire effective estimation results. For CBCT image reconstruction, few studies have been conducted on three-dimensional (3D) reconstruction. In addition, previous four-dimensional (4D) lung models are based on fan beam computed tomography, which are all-in-one models disregarding patients’ different shape of the organs and breathing patterns. To overcome these limitations, our goals are to track breathing motion without the surrogate, to build a 3D model based on CBCT images, and to achieve patient-customized 4D respiratory motion modeling. It is expected that this study would shorten respiration tracking processes and would enhance the accuracy of diagnosis, planning, and does delivery. Doctoral Student: Seonyeong Park
Support: NIH (Washington University)
Faculty: Yuichi Motai, School of Engineering (VCU), Siyong Kim, School of Medicine (VCU), Byongyong Yi, School of Medicine (University of Maryland), Michael Gach, School of Medicine (Washington University)
- Human target tracking by a mobile robot with an omni-directional thermal camera
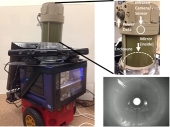 We investigate Target Tracking from Omni-directional (O-D) thermal images for intelligent perception in unmanned systems. Current target tracking approaches are primarily focused on perspective visual and infrared band, as well as O-D visual band tracking. The target tracking from O-D images and the use of O-D thermal vision have not been adequately addressed. Thermal O-D images provide a number of advantages over other passive sensor modalities such as illumination invariance, wide field-of-view, ease of identifying heat-emitting objects, and long time tracking without interruption. Unfortunately, thermal O-D sensors have not yet been widely used due to the following disadvantages: low resolution, low frame rates, high cost, sensor noise, and an increase in tracking time. This paper outlines a spectrum of approaches which mitigate these disadvantages to enable an O-D thermal IR camera equipped with a mobile robot to track a human in a variety of environments and conditions. The benefits of this method are decreasing the prediction time of a target’s position and increasing the accuracy of prediction of the next target position while increasing the tracking view and lightening conditions via the view from O-D IR camera. We investigate Target Tracking from Omni-directional (O-D) thermal images for intelligent perception in unmanned systems. Current target tracking approaches are primarily focused on perspective visual and infrared band, as well as O-D visual band tracking. The target tracking from O-D images and the use of O-D thermal vision have not been adequately addressed. Thermal O-D images provide a number of advantages over other passive sensor modalities such as illumination invariance, wide field-of-view, ease of identifying heat-emitting objects, and long time tracking without interruption. Unfortunately, thermal O-D sensors have not yet been widely used due to the following disadvantages: low resolution, low frame rates, high cost, sensor noise, and an increase in tracking time. This paper outlines a spectrum of approaches which mitigate these disadvantages to enable an O-D thermal IR camera equipped with a mobile robot to track a human in a variety of environments and conditions. The benefits of this method are decreasing the prediction time of a target’s position and increasing the accuracy of prediction of the next target position while increasing the tracking view and lightening conditions via the view from O-D IR camera. Doctoral Student: Emrah Benli
Support: Army Research Lab, U.S. Navy, Naval Surface Warfare Center Dahlgren, and Ministry of National Education of Turkey
Faculty: Yuichi Motai, School of Engineering (VCU), and and John Rogers (ARL)
- Deep Supervised Learning using Kernel and Sparse Neural Networks
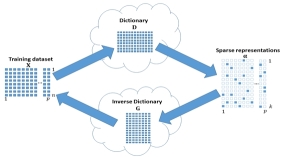 Multi-Column RBF Network (MCRN) is proposed as a method to improve the accuracy and speed of a traditional Radial Basis Function Network (RBFN). RBFN, as a fully connected artificial neural network (ANN), suffers from costly kernel inner-product calculations. This is due to the use of many instances as the hidden units’ centers. With small datasets, this is not a big issue since adding more hidden units will not burden computational time. However, for larger datasets, RBFN requires many hidden units to generalize the problem with a lot of kernel computations. The MCRN mechanism is built based on dividing a dataset into smaller subsets using the k-d tree algorithm. N resultant subsets are considered as separated training datasets to train N individual RBFNs. Those small RBFNs are stacked in parallel and bulged into the MCRN structure during testing time. MCRN is considered as a well-developed and easy to use parallel structure since each individual ANN has been trained on its own subsets and is completely separated from others. This parallelized structure speeds up testing time compared to a single but larger RBFN which cannot easily be parallelized due to its fully-connected structure. Small informative subsets give MCRN a regional experience to specify the problem instead of generalizing it. MCRN has been tested on many benchmark datasets and has showed better accuracy and great improvements in training and testing time compared to a single RBFN. MCRN also shows good results compared to some machine learning techniques such as support vector machine (SVM) and k-nearest neighbors (KNN). Multi-Column RBF Network (MCRN) is proposed as a method to improve the accuracy and speed of a traditional Radial Basis Function Network (RBFN). RBFN, as a fully connected artificial neural network (ANN), suffers from costly kernel inner-product calculations. This is due to the use of many instances as the hidden units’ centers. With small datasets, this is not a big issue since adding more hidden units will not burden computational time. However, for larger datasets, RBFN requires many hidden units to generalize the problem with a lot of kernel computations. The MCRN mechanism is built based on dividing a dataset into smaller subsets using the k-d tree algorithm. N resultant subsets are considered as separated training datasets to train N individual RBFNs. Those small RBFNs are stacked in parallel and bulged into the MCRN structure during testing time. MCRN is considered as a well-developed and easy to use parallel structure since each individual ANN has been trained on its own subsets and is completely separated from others. This parallelized structure speeds up testing time compared to a single but larger RBFN which cannot easily be parallelized due to its fully-connected structure. Small informative subsets give MCRN a regional experience to specify the problem instead of generalizing it. MCRN has been tested on many benchmark datasets and has showed better accuracy and great improvements in training and testing time compared to a single RBFN. MCRN also shows good results compared to some machine learning techniques such as support vector machine (SVM) and k-nearest neighbors (KNN). Doctoral Student: Ammar Hoori
Support: Higher Committee of Education Development of Iraq
Faculty: Yuichi Motai, School of Engineering (VCU)
Latest project list as of 2011 - Breathing prediction and patterns classification
 Accurate prediction of the respiratory motion could be beneficial to breathing motion compensation systems for external beam radiotherapy, e.g. CyberKnife system. A wide variety of breathing patterns can make it difficult to predict the breathing motion with explicit models. For accurate and reliable prediction of respiratory motion, this project research has used the model-free heuristic algorithm to develop system adaptive loops that have the most general approach. For the preprocedure of the prediction process for the individual patient, we conduct the classification based on breathing patterns of multiple patients using the feature selection metrics that are composed of a variety of breathing features. For the prediction and correction process, current works have included the Recurrent Neural Network for the role of the prediction and the Extended Kalman filter for the role of the correction. Accurate prediction of the respiratory motion could be beneficial to breathing motion compensation systems for external beam radiotherapy, e.g. CyberKnife system. A wide variety of breathing patterns can make it difficult to predict the breathing motion with explicit models. For accurate and reliable prediction of respiratory motion, this project research has used the model-free heuristic algorithm to develop system adaptive loops that have the most general approach. For the preprocedure of the prediction process for the individual patient, we conduct the classification based on breathing patterns of multiple patients using the feature selection metrics that are composed of a variety of breathing features. For the prediction and correction process, current works have included the Recurrent Neural Network for the role of the prediction and the Extended Kalman filter for the role of the correction. Doctoral Student: Suk Lee
Support: NSF ECCS (CAREER Award)
Faculty: Yuichi Motai, School of Engineering (VCU), and Elisabeth Weiss, School of Medicine (VCU) TOP
- Target tracking and 3D reconstruction using Pan-Tilt-Zoom (PTZ) camera
 We propose an efficient method to track a target using a single Pan-Tilt-Zoom (PTZ) camera. The proposed method estimates the motion of the target and rotates the camera accordingly to enlarge the filed of view while keeping the target at the center of the image. The proposed method estimates the scale of the target and adjusts the focal length of the camera relatively to keep the target the same size in all frames captured. Using Optical Flow and Scale-Invariant Feature, the twist model recovers the 3D motion of the target. Target tracking information and PTZ measurements are used in the 3D reconstruction project to recover the 3D structure and motion of the moving target. The method dynamically updates the 3D motion and structure of the target by estimating the PTZ measurements of the camera. A selective strategy is applied to select keyframes that show significant changes in target movement. The estimated PTZ measurements from those selected keyframes are used directly to update the recovered 3D motion and structure to minimize the space and time complexity. We propose an efficient method to track a target using a single Pan-Tilt-Zoom (PTZ) camera. The proposed method estimates the motion of the target and rotates the camera accordingly to enlarge the filed of view while keeping the target at the center of the image. The proposed method estimates the scale of the target and adjusts the focal length of the camera relatively to keep the target the same size in all frames captured. Using Optical Flow and Scale-Invariant Feature, the twist model recovers the 3D motion of the target. Target tracking information and PTZ measurements are used in the 3D reconstruction project to recover the 3D structure and motion of the moving target. The method dynamically updates the 3D motion and structure of the target by estimating the PTZ measurements of the camera. A selective strategy is applied to select keyframes that show significant changes in target movement. The estimated PTZ measurements from those selected keyframes are used directly to update the recovered 3D motion and structure to minimize the space and time complexity.
Doctoral Student: Salam Dhou
Support: TBA
Faculty: Yuichi Motai, School of Engineering (VCU) TOP
- Composite Kernel Feature Analysis with Data Associations
 Traditionally, computer-aided detection schemes have been developed for offline applications, where resources and training requirements are proportional to the number of training instances. Hereafter, we introduce the concept of training the algorithm by understanding the nature of the data that is being received from another database. Kernel Principal Component Analysis was then applied to a subset of these eigenvectors to obtain a final set of features. The new classification using kernel trick is introduced to project the dataset into higher dimension feature space, then the composite kernel is developed, the parameter of which is optimized by Fisher Discriminant and Kernel Alignment to maximize the class separability in the empirical feature space. Traditionally, computer-aided detection schemes have been developed for offline applications, where resources and training requirements are proportional to the number of training instances. Hereafter, we introduce the concept of training the algorithm by understanding the nature of the data that is being received from another database. Kernel Principal Component Analysis was then applied to a subset of these eigenvectors to obtain a final set of features. The new classification using kernel trick is introduced to project the dataset into higher dimension feature space, then the composite kernel is developed, the parameter of which is optimized by Fisher Discriminant and Kernel Alignment to maximize the class separability in the empirical feature space. Doctral Student: Dingkun Ma
Support: American Cancer Society Institutional Research Grant (Massey Cancer Center), VCU Presidential Research Incentive Program, NSF ECCS, and USPHS
Faculty: Yuichi Motai, School of Engineering (VCU), Hiroyuki Yoshida, Harvard Medical School (HMS) TOP
- Visual Fusion for Mobile Robotics
 This work plans to investigate the application of the optical flow field from omnidirectional vision cameras (color and Infrared (IR)) coupled with multispectral signature analysis to increase the level of intelligent perception for unmanned system platforms. While there has been a great deal of research in the area of intelligent robotic perception, the practical application of Unmanned Ground Vehicles (UGV) to operation with small teams of humans in many civilian, service, and military applications is limited by the current state of intelligent perception and the high cost of sensors. The current state of obstacle detection and avoidance is able to handle well structured obstacles, but is limited in distinguishing between solid obstacles and low density passable objects. The researchers are leveraging the benefits of potentially low-cost, omnidirectional color vision and infrared sensors coupled with intelligent perception algorithms to the solution to this problem. This work plans to investigate the application of the optical flow field from omnidirectional vision cameras (color and Infrared (IR)) coupled with multispectral signature analysis to increase the level of intelligent perception for unmanned system platforms. While there has been a great deal of research in the area of intelligent robotic perception, the practical application of Unmanned Ground Vehicles (UGV) to operation with small teams of humans in many civilian, service, and military applications is limited by the current state of intelligent perception and the high cost of sensors. The current state of obstacle detection and avoidance is able to handle well structured obstacles, but is limited in distinguishing between solid obstacles and low density passable objects. The researchers are leveraging the benefits of potentially low-cost, omnidirectional color vision and infrared sensors coupled with intelligent perception algorithms to the solution to this problem.
Doctoral Student: David Stone
Support: NAVY
Faculty: Yuichi Motai, School of Engineering (VCU) TOP
Former project list 2005-2011 - Head tracking by AC-magnetic tracker using adaptive extended Kalman filter
 Head tracking is widely used in human-computer interaction systems and virtual reality environments. The perceived latency between head motion and computer response causes loss of immersion for the user which can result in dizziness in extreme cases. Additionally, noise in the head orientation data can result in a “swimming effect” that destroys the illusion of virtual reality. The Extended Kalman Filter (EKF) is typically used to compensate for system latency and can provide optimal estimation if the filter is correctly tuned to the incoming data. In head tracking applications, the large dynamic range of head motion and the unknown noise content of the incoming data require a compromise of the tuning parameters that results in less than optimum performance. Additionally, prediction amplifies the output error of the filter when the state vector is projected out in time. Adaptive filter techniques can be applied to the EKF to dynamically mitigate the undesirable behavior of the filter due to less than optimum tuning. Head tracking Kalman filters typically use a constant velocity model that models changes in head motion as random noise. Constant velocity filters work well for slow head motion but suffer from significant overshoot during sudden movement, especially if large prediction times are used. The project will investigate other system models such as constant acceleration in an attempt to resolve the overshoot issue. Head tracking is widely used in human-computer interaction systems and virtual reality environments. The perceived latency between head motion and computer response causes loss of immersion for the user which can result in dizziness in extreme cases. Additionally, noise in the head orientation data can result in a “swimming effect” that destroys the illusion of virtual reality. The Extended Kalman Filter (EKF) is typically used to compensate for system latency and can provide optimal estimation if the filter is correctly tuned to the incoming data. In head tracking applications, the large dynamic range of head motion and the unknown noise content of the incoming data require a compromise of the tuning parameters that results in less than optimum performance. Additionally, prediction amplifies the output error of the filter when the state vector is projected out in time. Adaptive filter techniques can be applied to the EKF to dynamically mitigate the undesirable behavior of the filter due to less than optimum tuning. Head tracking Kalman filters typically use a constant velocity model that models changes in head motion as random noise. Constant velocity filters work well for slow head motion but suffer from significant overshoot during sudden movement, especially if large prediction times are used. The project will investigate other system models such as constant acceleration in an attempt to resolve the overshoot issue. Doctoral Student: Henry Himberg
Support: Polhemus Inc educational scholarship
Faculty: Yuichi Motai, School of Engineering (VCU) TOP
- Vehicular collision avoidance system by inter-vehicle communications
 This system will use GPS mapping data to know what is ahead and determine intelligently if there could be a collision ahead. It needs to be accurate and it should not give many false warnings, especially in curves, like it is happening with the systems designed in other research papers. Each car will communicate to other nearby cars its location, direction, and speed. Each car will process the information received from nearby cars and calculate if the paths will meet ahead, and if so it will give the driver a warning. The system will judge collisions based on speed and road ahead and will give a warning if close to minimum breaking distance to prevent accident. Communication between cars could be done either via ad-hoc WAN or Bluetooth. This system will use GPS mapping data to know what is ahead and determine intelligently if there could be a collision ahead. It needs to be accurate and it should not give many false warnings, especially in curves, like it is happening with the systems designed in other research papers. Each car will communicate to other nearby cars its location, direction, and speed. Each car will process the information received from nearby cars and calculate if the paths will meet ahead, and if so it will give the driver a warning. The system will judge collisions based on speed and road ahead and will give a warning if close to minimum breaking distance to prevent accident. Communication between cars could be done either via ad-hoc WAN or Bluetooth.
Doctoral Student: Cesar Barrios
Support: IBM educational scholarship
Faculty: Dryver Huston and Yuichi Motai, School of Engineering (VCU) TOP
- Learning by imitation for behavioral motions between multiple humanoid robotics
 Humanoid Robots are highly configurable automated devices used in a variety of applications. Previous work has been done to mimic the motion of a human or another robot. This is often done using a visual sensing camera attached to the same processor that the robot is controlled by. We hope to explore the area of continuous repetition. This will involve two robots both possessing a camera and controlling processor. The robots will then take turns repeating the actions of the other robot. This will mimic what would happen if a long series of robots continuously repeated the actions of the robot before it. Another application of this would be an environment where many robots repeated the action of a single robot. Part of this work will involve a system to detect motion of the other robot and extrapolate the individual humanoid robot servo motor position data. At the end of the experiment we will measure the quality of repetition by reading out the position of the final robot’s servo motors and comparing them with the initial controlled robot’s position. Humanoid Robots are highly configurable automated devices used in a variety of applications. Previous work has been done to mimic the motion of a human or another robot. This is often done using a visual sensing camera attached to the same processor that the robot is controlled by. We hope to explore the area of continuous repetition. This will involve two robots both possessing a camera and controlling processor. The robots will then take turns repeating the actions of the other robot. This will mimic what would happen if a long series of robots continuously repeated the actions of the robot before it. Another application of this would be an environment where many robots repeated the action of a single robot. Part of this work will involve a system to detect motion of the other robot and extrapolate the individual humanoid robot servo motor position data. At the end of the experiment we will measure the quality of repetition by reading out the position of the final robot’s servo motors and comparing them with the initial controlled robot’s position. Master Student: Scott Vento and Danniel Couture
Support: IBM educational scholarship, NSF EPSCoR
Faculty: Yuichi Motai, School of Engineering (VCU) TOP
- An incremental on-line framework of multiple support vector machine, kernel principal component analysis, and kernel feature analysis for behavioral classification of articulated motions
 When the dimension of input data is very low, sometimes it's very hard to linearly classify the data. The higher dimension will lead to better classification performance, but meanwhile the computation complexity is also increased. Kernel method is proposed to use the advantage of higher dimension while still maintain the reasonable computation time. Our project is to specifically study the kernel PCA which can be used to reconstruct the data in the feature space, de-noise the input data, or cluster the unlabeled data. The traditional Kernel PCA needs to solve the eigenvalue problem with the same size as the training data set. In addition, each eigenvector is the combination of all training data, which makes it unacceptable for on-line learning. We proposed a new method to improve the efficiency of kernel PCA. Experiment results demonstrated that the performance of the eigenvectors we selected is very close to the kernel PCA, and the computational complexity is much less than the traditional kernel PCA. When the dimension of input data is very low, sometimes it's very hard to linearly classify the data. The higher dimension will lead to better classification performance, but meanwhile the computation complexity is also increased. Kernel method is proposed to use the advantage of higher dimension while still maintain the reasonable computation time. Our project is to specifically study the kernel PCA which can be used to reconstruct the data in the feature space, de-noise the input data, or cluster the unlabeled data. The traditional Kernel PCA needs to solve the eigenvalue problem with the same size as the training data set. In addition, each eigenvector is the combination of all training data, which makes it unacceptable for on-line learning. We proposed a new method to improve the efficiency of kernel PCA. Experiment results demonstrated that the performance of the eigenvectors we selected is very close to the kernel PCA, and the computational complexity is much less than the traditional kernel PCA.
Doctoral Student: Mariette Award
Support: NSF EPSCoR and IBM educational scholarship
Faculty: Yuichi Motai, School of Engineering (VCU) TOP
- Rodent behavior identification with near-infrared illumination
 This research project uses computer vision methods to identify behaviors of rodents such as rats and mice, and to track their position in an enclosed, pre-defined space. Automated position tracking and behavior analysis is important and useful for the areas of behavioral pharmacology (to determine effects of medication in a pre-clinical setting), genetics (behavioral phenotyping), and drugs of addiction (mechanisms and treatments). Color and motion based algorithms were developed for position tracking, and decision trees were used for classifying behaviors based on various attributes including area (from an overhead 2D view), perimeter, circularity, etc. Current work involves refining methods of identifying behavior, and learning the behaviors using ID5R (incremental decision tree). This research project uses computer vision methods to identify behaviors of rodents such as rats and mice, and to track their position in an enclosed, pre-defined space. Automated position tracking and behavior analysis is important and useful for the areas of behavioral pharmacology (to determine effects of medication in a pre-clinical setting), genetics (behavioral phenotyping), and drugs of addiction (mechanisms and treatments). Color and motion based algorithms were developed for position tracking, and decision trees were used for classifying behaviors based on various attributes including area (from an overhead 2D view), perimeter, circularity, etc. Current work involves refining methods of identifying behavior, and learning the behaviors using ID5R (incremental decision tree).
Doctoral Student: J. Brooks Zurn
Support: MED Associates Inc, NSF EPSCoR
Faculty: Yuichi Motai, School of Engineering (VCU) TOP
| |