
Brain Computer Interfaces (BCI) are direct functional interactions between a human brain and an external device. BCI have recently gained a new interest as a practical Human Machine Interface (HMI). Although early BCI was proposed in the late seventy's, wide spread use was limited due to equipment cost and complexity. However, recent technological advantages have enabled the development of low cost BCI devices that are aimed at the mass market. The Neurosky Minwave device and the Emotiv EPOC headset are examples of low cost BCI devices. BCI is performed by measuring the brain activity of a user and then identifying the thought pattern or desired action using of the user. Brain activity is measured by detecting minute voltage changes in specific areas of the brain . This can be done in three ways: 1) invasive, where electrodes are placed on the brain itself, 2) partially-invasive where electrodes are placed in the skull and 3) non-invasive where electrodes are placed on the scalp. Electroencephalography (EEG) is the only currently available non-invasive brain activity measuring method and therefore it is the most widely used . A BCI framework block diagram is shown below: |
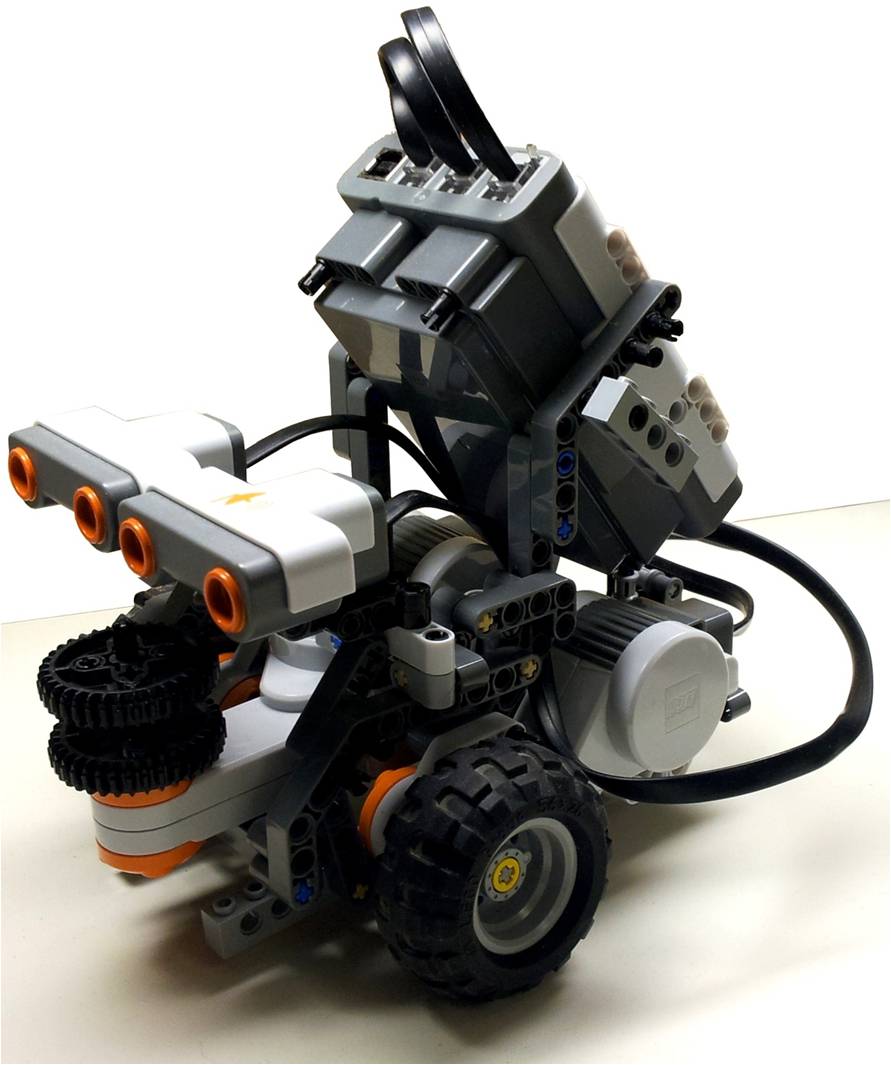
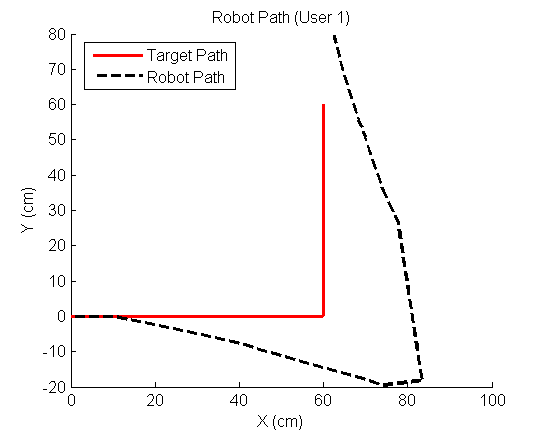
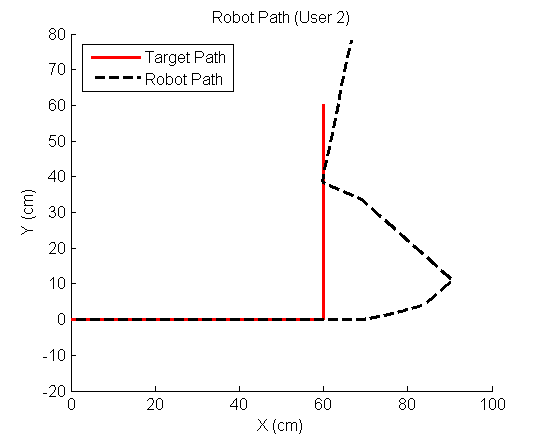
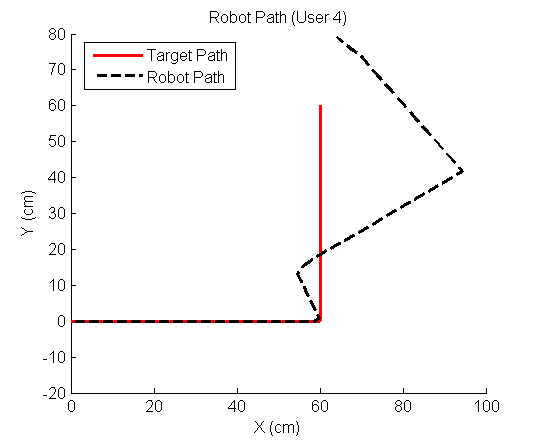
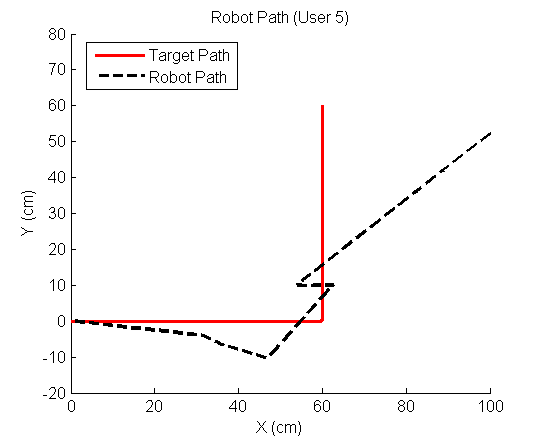
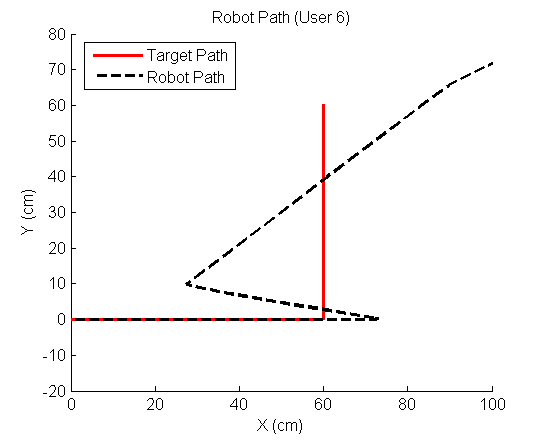
An implementation of a differential wheeled mobile robot that is controlled by identifying brain activity of the user is presented in our study. The mobile robot was controlled by using 4 commands: “neutral”, “move forward”, “turn left” and “turn right”. These commands were identified by measuring the brain activity of the user at a given time. Performance of the mobile robot over a given path was measured. A differential wheeled robot is a mobile robot with 2 or more wheels. Two wheels on either side of the robot body are driven separately and this governs the movement of the robot . The figure below shows the diagram of the differential wheeled robot used in our study. The third wheel is a free turning wheel used to balance the robot. The differential wheeled robot shown in Fig was implemented using Lego NXT. This enables the communication between robot and a computer wirelessly via Bluetooth. Furthermore, the rotation of the motors can be controlled using integer values between -100 and +100,and an accurate measure of the number of turns each motor performed can also be acquired. |
 |
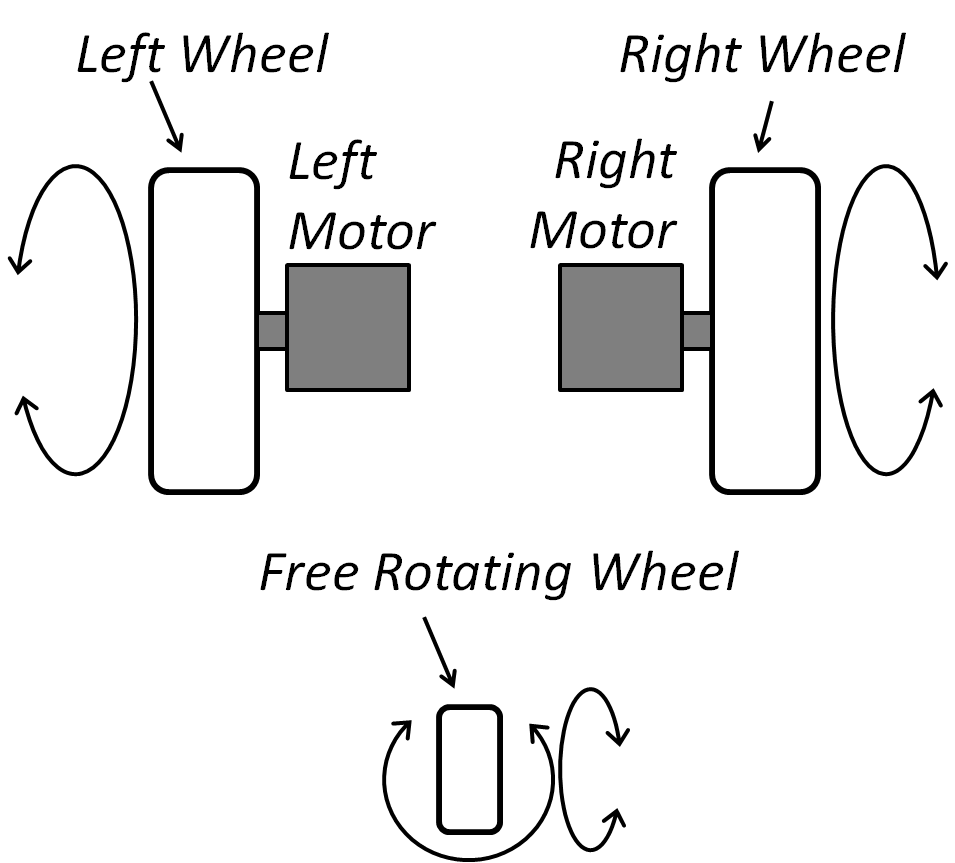 |
Differential Wheeled Robot
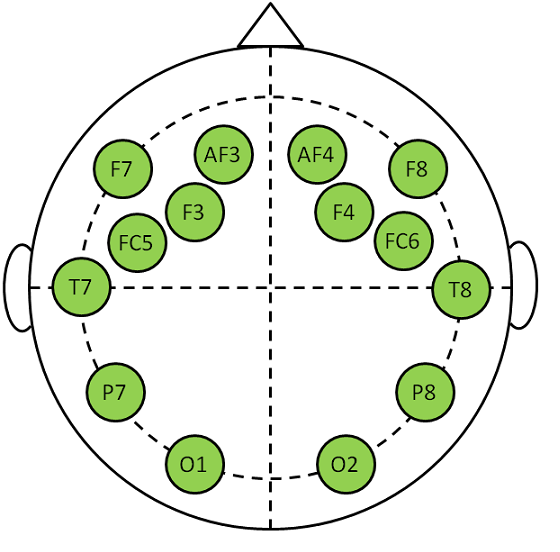
This section elaborates the hardware setup and used for the BCI framework presented in our study. The Emotiv EPOC Neuroheadset is a low cost easy to use BCI device (Fig (a)). It is able to measure brain activity of the wearer by utilizing 14 sensors (Fig. (b)). Each of the 14 sensors is an electrode which is hydrated using a saline solution. This is necessary to increase the conductivity of the contact pad and thus increase the sensitivity of the reading. These sensors are placed according to the international 10-20 system . Fig.c shows the locations utilized by the Emotiv EPOC headset according to the 10-20 system electrode locations. The sampling rate of the EPOC headset is 2048 Hz with 14 bit resolution. This enables fast and precise data collocation. Additionally, gyroscopic sensors are located in the headset that can detect the orientation of the headset. It has been shown that the Emotiv EPOC headset compares well with high grade research level equipment and the information retrieved is reliable and sufficient for most applications .The wireless design and low comparable weight enables users to wear the EPOC headset for longer durations of time, compared with more sophisticated EEG devices Furthermore, the comparatively low preparation time enables regular use. |
 |
 |
 |
Fig(a)Emotiv EPOC Neuroheadset |
Fig(b)Sensor Pad |
Fig(c)Sensor Placements |
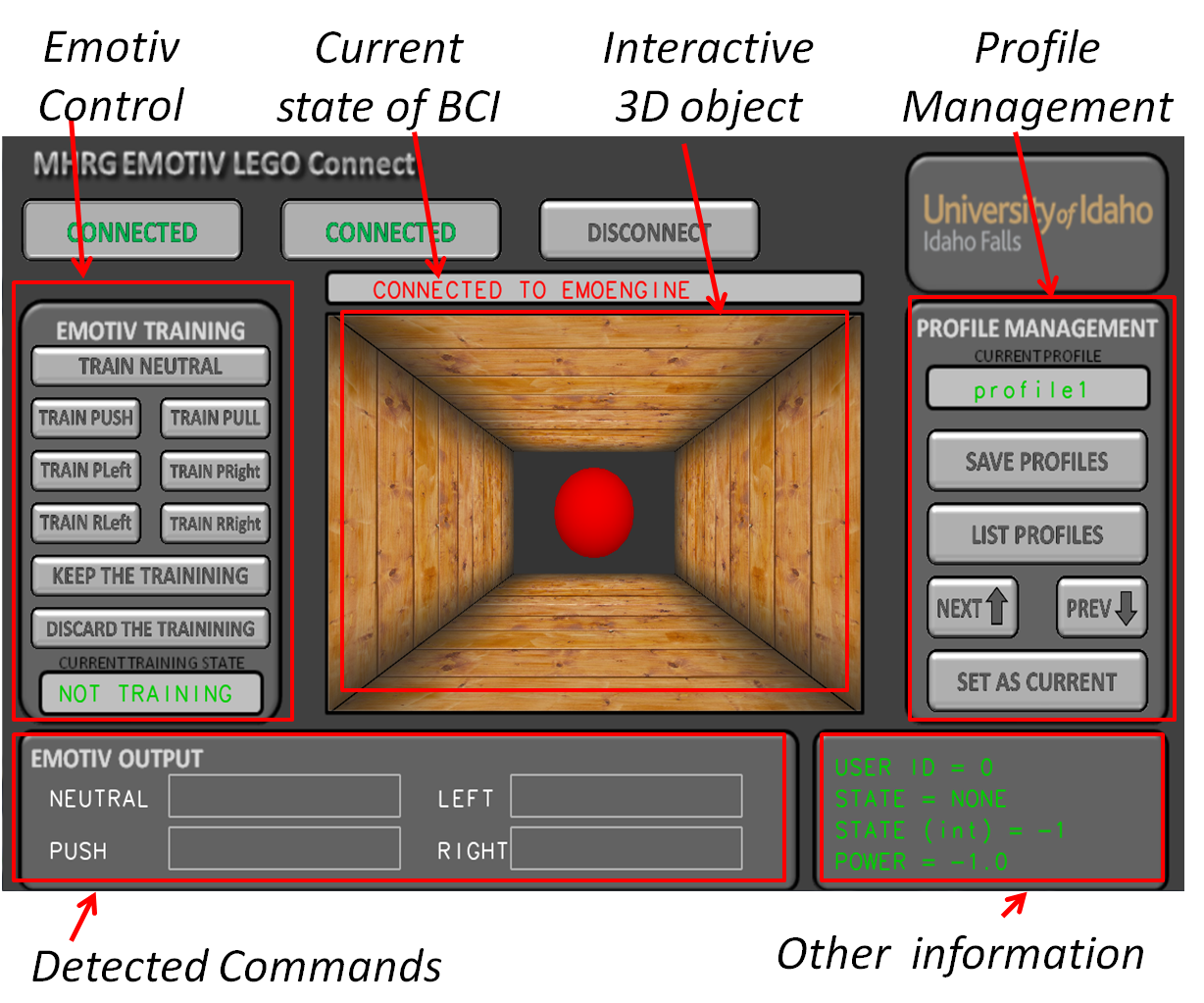
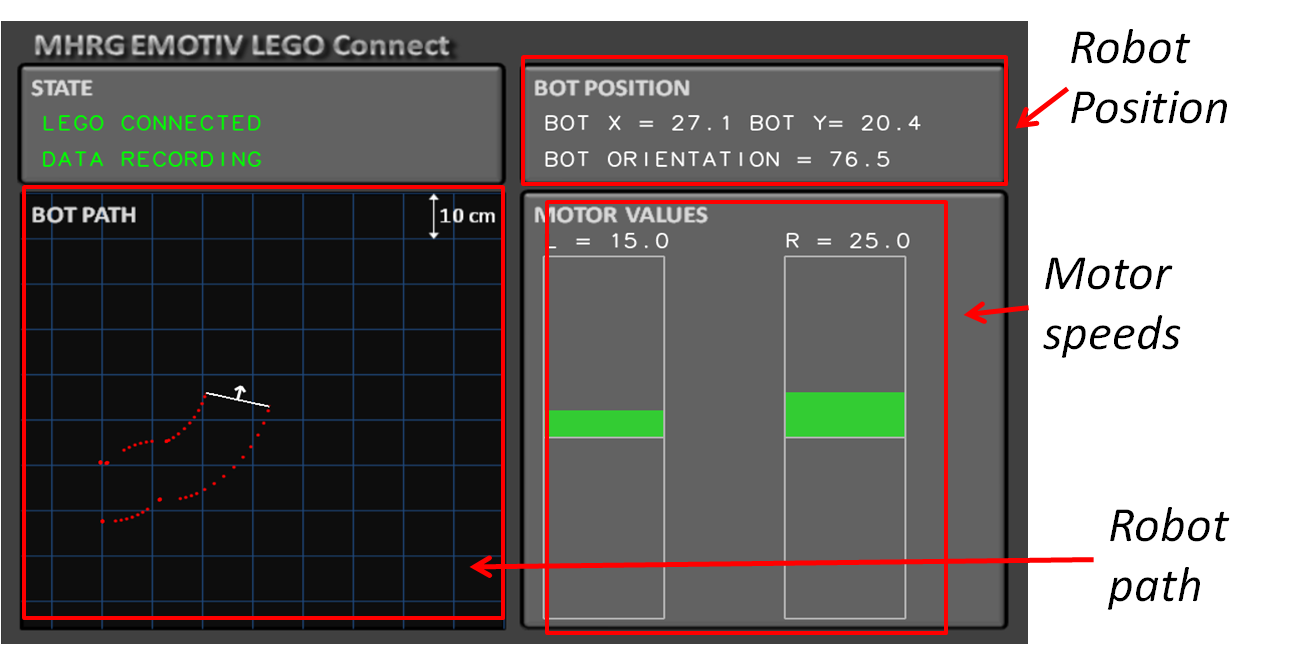
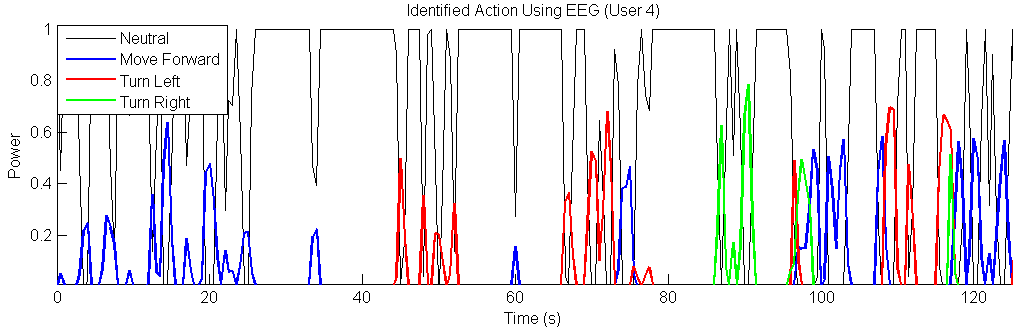
In order to implement the BCI, Emotiv SDK and Lego NXT SDK was used. A Graphical User Interface (GUI) was implemented in the C++ environment that combines the processed signals from the Emotiv SDK and the control outputs to the mobile robot. The implemented GUI provides the seamless connection required between the brain activity and the motion of the robot. Since the brain activities of individuals are different, each thought pattern corresponding to an action has to be identified for different individuals. The Emotiv SDK enables the training of the system to different individuals. Thus, before a new user can successfully control the mobile robot, training must take place. The required training process can also be performed using the implemented GUI. The implemented GUI consists of 2 windows. The first window, shown in Fig. A, extracts the EEG data and converts it into an action (neutral, push, turn left or turn right). Different users can be added to the BCI environment using the implemented profile management. The required training for different users can also be performed using this window. In order to aid the training and controlling process a 3D object that can be manipulated by thought is displayed on this window. Once training is completed a user profile can be saved and retrieved at a later time. The second window, shown in Fig. B, provides the user with information about the mobile robot. The robot path is shown including a history of the motion. The calculated speeds of the motors are also displayed as well as the position and orientation in space. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
D. Wijayasekara, M. Manic, "Human Machine Interaction via Brain Activity Monitoring," in Proc. of IEEE 6th International Conference on Human System Interaction, IEEE HSI 2013, Gdansk, Poland, June 6-8, 2013.PDF