
Contact Dr. Cang Ye
Phone:(804) 828-
Google Voice: (501) 237-
Fax: (804) 828-
Email: cye@vcu.edu
Laboratory
Dept. of Computer Science
Virginia Commonwealth University
401 West Main Street, E2264
Richmond, VA 23284-
Office
Dept. of Computer Science
Virginia Commonwealth University
401 West Main Street, E2240
Richmond, VA 23284-



Robotics Laboratory
Department of Computer Science, College of Engineering
Virginia Commonwealth University




© 2016 Dr. Ye's LAB. ALL RIGHTS RESERVED.

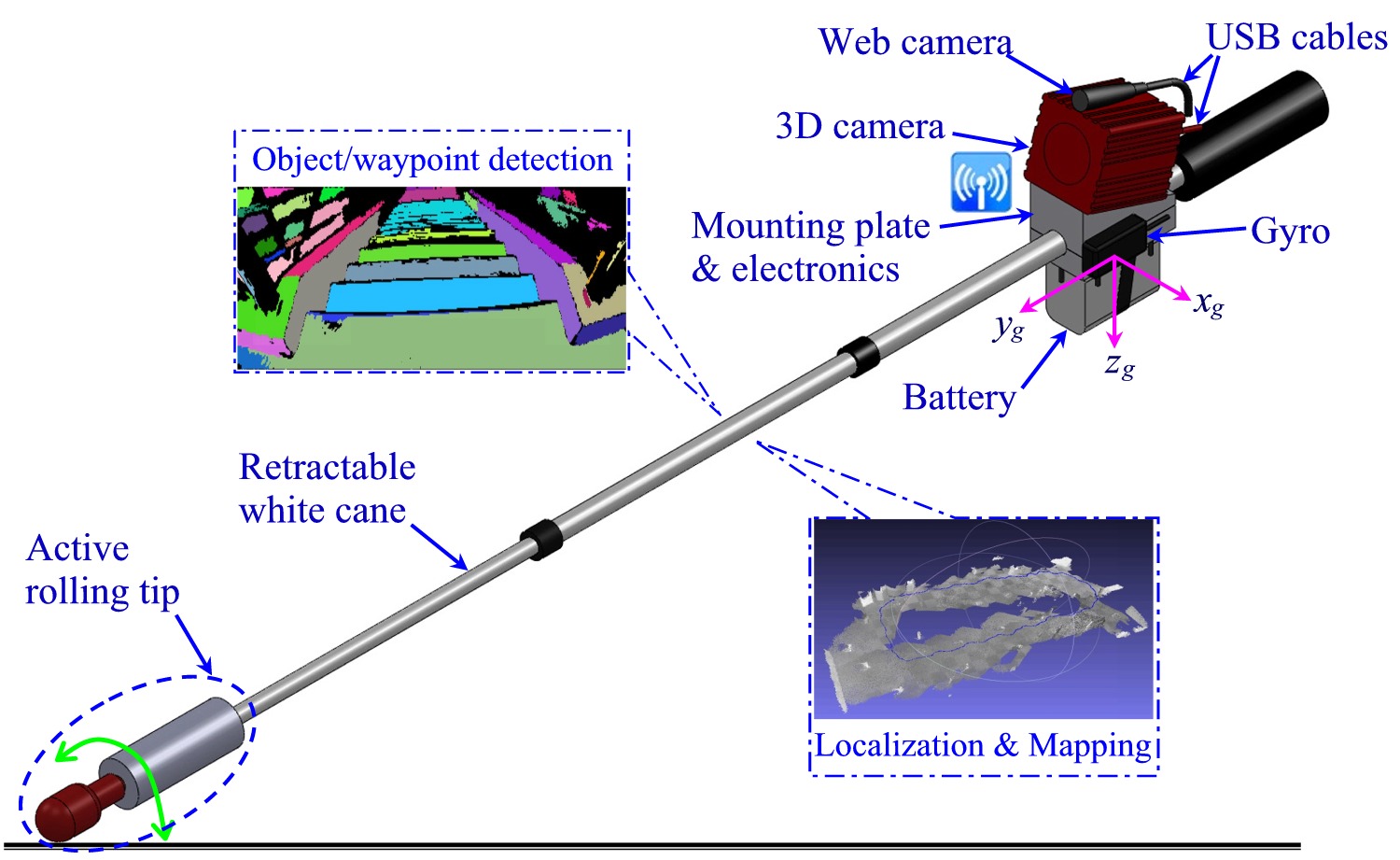
A Co-

The objective of the project is to develop a co-
Overview of the Co-

Selected Publications
- L. Jin, H. Zhang, C. Ye, "Camera Intrinsic Parameters Estimation by Visual Inertial Odometry for a Mobile Phone with Application to Assisted Navigation," IEEE/ASME Transactions on Mechatronics, vol. 25, no. 4, pp. 1803-
1811, 2020. - 6. H. Zhang and C. Ye, "Plane-
Aided Visual- Inertial Odometry for 6- DOF Pose Estimation of a Robotic Navigation Aid," IEEE Access, vol. 8, pp. 90042- 90051, 2020. - H. Zhang and C. Ye, "An Indoor Wayfinding System based on Geometric Features Aided Graph SLAM for the Visually Impaired," IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 25, no. 9, pp. 1592-
1604, 2017. - C. Ye and X. Qian, "3D Object Recognition of a Robotic Navigation Aid for the Visually Impaired," IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 26, no. 2, pp. 441-
450, 2018. - H. Zhang and C. Ye, “An Indoor navigation aid for the visually impaired,” in IEEE International Conference on Robotics and and Biomimetics (ROBIO), Qingdao, China, 2016.
- C. Ye, S. Hong, X. Qian, and Wei Wu, "Co-
Robotic Cane: A New Robotic Navigation Aid for the Visually Impaired," IEEE System, Man, and Cybernetics Magazine, vol. 2, no. 2, pp. 33- 42, 2016. - C. Ye, S. Hong, and A. Tamjidi, "6-
DOF Pose Estimation of a Robotic Navigation Aid by Tracking Visual and Geometric Features," IEEE Transactions on Automation Science and Engineering, vol. 12, no. 4, pp. 1169- 1180, 2015. - X. Qian and C. Ye, "NCC-
RANSAC: A Fast Plane Extraction Method for 3D Range Data Segmentation," IEEE Transactions on Cybernetics, vol. 44, no. 12, pp. 2771- 2783, 2014. - H. Zhang and C. Ye, "DUI-
VIO: Depth Uncertainty Incorporated Visual Inertial Odometry based on an RGB- D Camera," Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020. - H. Zhang, L. Jin, C. Ye, "The VCU-
RVI Benchmark: Evaluating Visual Inertial Odometry for Indoor Navigation Applications with an RGB- D Camera," Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020. - H. Zhang and C. Ye, "A Visual Positioning System for Indoor Blind Navigation," Proceedings of IEEE International Conference on Robotics and Automation, 2020, pp. 9079-
9085. - H. Zhang, L. Jin, and C. Ye, "A Depth-
Enhanced Visual Inertial Odometry for a Robotic Navigation Aid for Blind People," Visual- Inertial Navigation: Challenges and Applications Workshop at 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. (received Lord Best Paper Award) - S. Hong and C. Ye, "A Pose Graph based Visual SLAM Algorithm for Robot Pose Estimation," in Proceedings of 2014 World Automation Congress, Big Island, HI.
- C. Ye, S. Hong and X. Qian, "A Co-
Robotic Cane for Blind Navigation," in Proceedings of 2014 IEEE International Conference on Systems, Man, and Cybernetics, San Diego, CA. - X. Qian and C. Ye, "3D Object Recognition by Geometric Context and Gaussian-
Mixture- Model- Based Plane Classification," in Proceedings of 2014 IEEE International Conference on Robotics and Automation, Hong Kong, China. - S. Hong and C. Ye, "A Fast Egomotion Estimation Method based on Visual Feature Tracking and Iterative Closest Point," in Proceedings of 2014 IEEE International Conference on Networking, Sensing and Control, Miami, FL. (received Best Student Paper Finalist Award)
| Ongoing Project |
| Past Projects |
| Publications & Patents |
| Grants |
| Ph.D. Student Positions |
| Postdoc Position |
| Dr. Cang Ye |
| Current Members |
| Alumni |